Modellbahn



















MoBaSbS - Modellbahn Selbstbau Steuerung
Zur Zentrale und deren Aufbau kann man die Seite von Patrick Urban besuchen.
Ich zeige und beschreibe hier meinen Aufbau.
Bis Anfang 2009 habe ich meine MoBa mit dem Twin-Center von Fleischmann gesteuert.
Am Twin-Center waren folgende Digitalkomponenten angeschlossen:
•
4 LDT Magnetartikel-Decoder
•
4 LDT Schalt-Decoder (Relais)
•
1 WDecN-TN Lichtsignal-Decoder
•
3 GBM16 Rückmelder am LocoNet Strang
•
2 Booster am 5-poligen Booster Bus
Es galt nun eine
Zentrale zu finden, mit
der ich diese gut
funktionierenden
Komponenten weiter
betreiben konnte.
Die bestehenden
Rückmelder wollte ich
auf keinen Fall
aufgeben, da sie
perfekt funktionieren.
Ein LocoNet Interface
bieten aber meines
Wissens nur Zentralen
von Digitrax und
Uhlenbrock, sowie
deren Derivate.
Deshalb habe ich entschieden, einen
LocoBuffer anzuschaffen, und die
Rückmeldung von der Zentrale zu trennen.
Nach erfolgreichem Abschluss dieses
Projektes stand einer Ablöse des Twin-
Centers nichts mehr im Wege.
Die MoBaSbS bietet zwar für alle meine
bestehenden Peripherie-Module eine eigene
Lösung, die bereits verbauten Komponenten
wollte ich aber nicht wieder abmontieren.
In der aktuellen Version 4 werden der DCC
Norm entsprechende Decoder unterstützt, ich
konnte meine 9 bestehenden weiterhin
einsetzen.
Ebenso wollte ich nicht den MoBaSbS eigenen Booster nachbauen, sondern die vorhandenen
weiter benutzen. Auch diese Vorgabe konnte erfüllt werden.
Als letztes Basismodul wurde Anfang 2010 der DPC (DCC Programmer) realisiert.
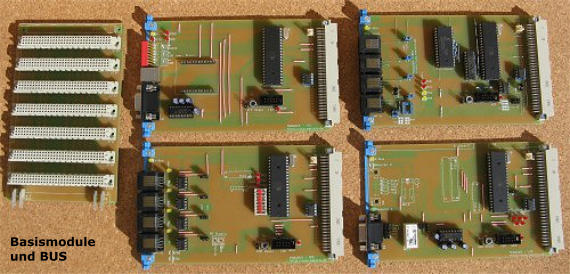
Für meinen Wunschbetrieb musste ich folgende Basis-Module aufbauen:
BMC
Basis Modul Controller
IFC
Interface Modul Controller
USC
Universal Signal Controller
PMC
Peripherie Modul Controller
HDC
Hand Daten Controller
DPC
Decoder Programmier Controller
Der BMC ist das Herz:
er koordiniert die Kommunikation,
hält die Lok-Datenbank bereit und
kann bis zu 31 HDC's (= Fahrpulte)
aufnehmen.
Ab TrainController 7 ist es auch
möglich, diese Lok-Datenbank
auszulesen und zu beschreiben.
Erst ein Eintrag in der Datenbank
ermöglicht das manuelle oder PC
gesteuerte Fahren einer Lok.
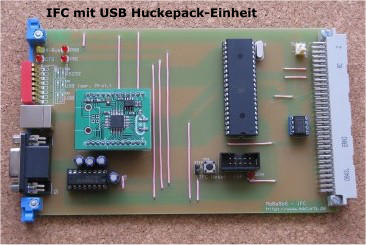
Der IFC schafft die Verbindung zum
Computer und kann seriell sowie
über einen Zusatzadapter auch über
USB mit dem PC kommunizieren.
Ich habe die USB Variante
zusätzlich aufgebaut und benutze
diese auch.
Der USC erzeugt die DCC Signale
für die Loks und (in meinem Fall)
die vorhandenen DCC Decoder. Der
Boosterbus wird am USC ange-
schlossen.
Der PMC steuert die MoBaSbS
eigenen Peripheriemodule. Im
Unterschied zum DCC System, bei
dem alle Schaltdecoder vom selben
Signal wie die Loks versorgt
werden, hat die MoBaSbS dafür einen extra Peripherie Bus.
Damit ist z.B. eine bidirektionale Kommunikation möglich sowie die Trennung Fahren, Schalten und
Melden.
Die Module können über die Konfig-Software komplett verwaltet, geprüft und adressiert werden.
Der HDC ist sowohl Fahrpult als auch
Eingabesystem für die MoBaSbS. Einen
Lokdatensatz mit Namen und allem drum
und dran erzeugt man aber besser und
schneller mit dem MoBaSbS eigenen
Konfigurations Tool am PC.
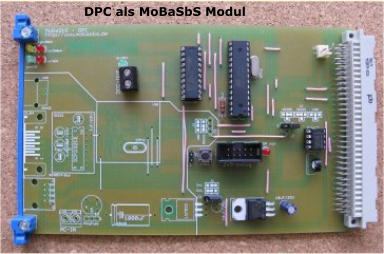
Der DPC (Bild links) dient dazu, DCC
konforme Lok-Decoder zu programmieren.
Das MoBaSbS Konfig-Tool oder auch
Fremdsoftware, wie der TrainProgrammer
von Freiwald, können dazu benutzt
werden.
Die Platine ist dafür ausgelegt, auch als
Einzelgerät unabhängig betrieben zu
werden. Ich habe sie als MoBaSbS interne
Baugruppe aufgebaut, wodurch einige Bauteile entfallen können (hauptsächlich Kommunikations-
Komponenten wie USB, COM-Port usw.)
Als Peripherie-Module habe ich bis jetzt aufgebaut:
SDEC4
4fach Servo-Decoder
DEC8
8fach FET-Decoder
ENC
8fach Encoder für Eingänge
LDEC
Lichtsignaldecoder
Am Servo-Decoder werkeln bereits 2 Servos, die im
ersten Test einen Mikroschalter direkt am Gehäuse
montiert bekamen, um die Herzstückpolarisierung zu
realisieren (siehe Bild rechts). Sie bedienen Weichen,
die aus Platzgründen keinen Unterflurantrieb ermög-
licht hätten. Die Servos mit selbstgebautem
"Bowdenzug" ausgestattet, können auch etwas
entfernt sitzen.
Ich werde auch einige der vorhandenen Hoffmann-
Antriebe durch Servos ersetzen, da diese bereits
Ausfallerscheinungen zeigen.
Der FET-Decoder kann später Lichter, Bahnübergänge
und ähnliches steuern.
Den Encoder habe ich erfolgreich mit Hallsensoren
getestet (Car-System Rückmeldungen).
Im 2. Bauabschnitt der Anlage werden alle Schaltvorgäne mit den MoBaSbS-Peripherie-Modulen
durchgeführt.
Nur bei den Rückmelder bleibe ich beim eingeführten System Blücher und dem LocoBuffer 3.
Ich verspreche mir von den Eigenbau-Modulen folgende Vorteile:
•
geringere Kosten durch Selbstbau
•
bessere Trennung vom Fahrsystem und Entlastung des DCC Signales
•
flexibler durch den PMC-Bus (Verkabelung)
•
bessere Konfiguration und Überwachung der Module
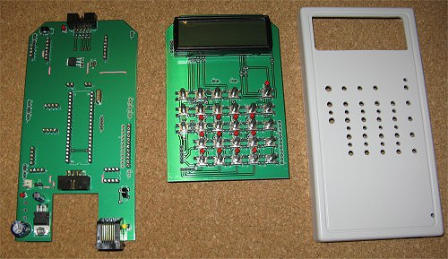
Der Aufbau des HDC ist etwas fieselig.
Die Huckepack Bauweise ist schon recht
anspruchsvoll, aber das genaue Bohren
der Löcher und die Aussparungen für
Display, Programmierstecker und
Datenkabel können einem den letzten
Nerv rauben.
(Warum habe ich mir nicht eine Tams
Zentrale besorgt)
Aber irgendwann war der HDC auch
fertig und hat mich gleich begrüßt.
Irgendwie hatte ich im Eifer des
Gefechts den Taster des Drehgebers gar
nicht angeschlossen und mich gewundert,
dass ich die Fahrtrichtung der Lok nicht
damit wechseln konnte.
Aber, man kann ja noch mal im Forum
fragen und durch die schnellen, passenden
Tipps war das Rätsel gleich gelöst.
Nun ist auch der 2. HDC aufgebaut (im Bild
der linke, schwarze). Das erste Gehäuse
habe ich beim Versuch, alles besonders
"flach" zu bauen, geschrottet.
Ich habe beim zweiten HDC ein anderes
Display genommen, das zwar Pin-
kompatibel, aber unsymmetrisch ist. Die
Idee war, alles tiefer zu legen, damit das
Display nicht nach oben raus schaut. Ist aber
leider nicht möglich, denn dann schauen die
Taster auch nicht mehr raus.
Das schwarze Gehäuse kaschiert aber das
nach links ragende Display recht gut. Durch
die LED Hintergrundbeleuchtung ist es
wesentlich besser abzulesen. Die dritte LED
in der untersten Reihe tanzt leider aus der
letzteren - manche Dinge
bemerkt man erst, wenn es zu
spät ist.
Jetzt muss ich mir nur noch
überlegen, welche Loks ich auf
welche Fahrpult-Tasten der
HDC's verteile.
Im Moment habe ich nur die
Funktionstasten Licht, F1 bis F4
aktiv (mehr Funktionen hat
mein Fuhrpark nicht), alles
andere kann mit Loks vorbelegt
werden. Damit kann ich pro
Handregler 13 Loks vorbelegen
- das sollte reichen.
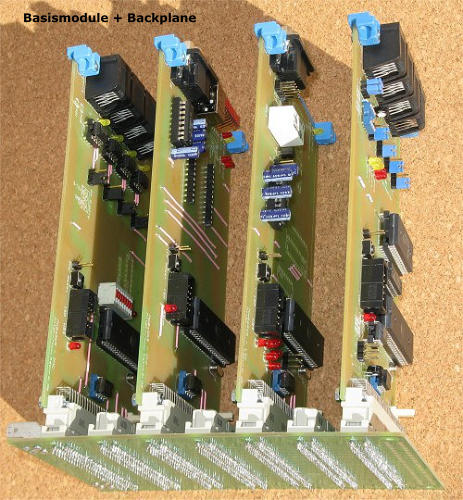
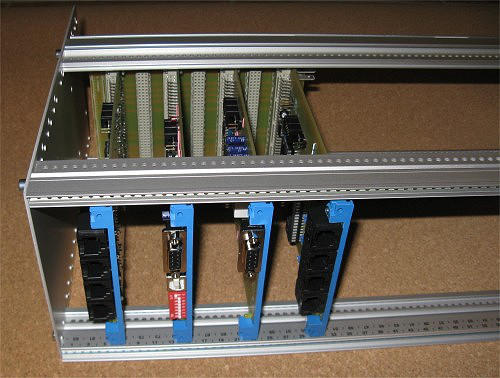
Die Module erhielten auch noch
einen Baugruppenträger spen-
diert. Dieser wird bei Gelegen-
heit noch ordentlich mit Front-
blenden verschlossen und be-
schriftet.
Nachdem der Anlagenbau
MoBaSbS bedingt etwas ins Stocken
gekommen ist, geht es erst mal dort
weiter.
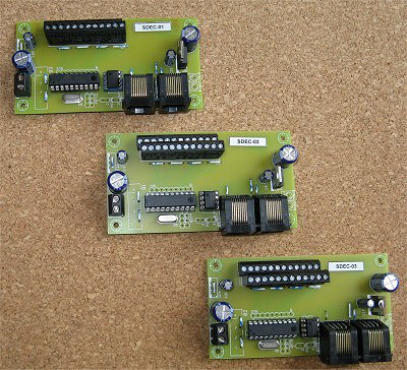
Den SDEC-4 zeigt das Bild links.
Er wird über den Peripherie-Bus per
RJ45 Stecker versorgt. Man kann für
die Verbindung Standard Patchkabel
(oder 8 polige ISDN-Kabel) aus dem
EDV Zubehör verwenden.
FET-Decoder und Encoder haben die
selben Abmessungen und ähnliche
Bestückung.
Ein abschließendes Statement
Das Projekt hatte wieder viele neue und
unbekannte Facetten, wie Stücklisten
studieren und Bauteile besorgen,
Baugruppen löten und prüfen,
Mikrocontroller programmieren und auch handwerkliches wie HDC bauen.
Es hat Spaß gemacht aber auch viel Zeit in Anspruch genommen.
Es gibt zwar alle Informationen im Internet, aber manche Dokus und Excel Listen sind auch mit
den Jahren "gewachsen" und ich habe schon mal was falsch interpretiert oder nicht gleich
gefunden.
Die Unterstützung der MoBaSbS Gemeinde ist aber enorm - ich hab alles hin bekommen und bin
jetzt natürlich stolzer Besitzer einer Selbstbau-Zentrale.
Ein Dank an dieser Stelle an die immense Arbeit der Entwickler des Projektes.
Grundsätzlich verspreche ich mir von dieser Zentrale:
•
keine Leistungsprobleme bzw. Engpässe durch das modulare, funktionsverteilte Konzept
•
optimale Anbindung an TrainController (fast alle MoBaSbS Benutzer fahren mit TC)
•
günstige Peripherie-Module (Encoder und Decoder)
•
die Möglichkeit, defektes selbst zu reparieren




© by Kircher